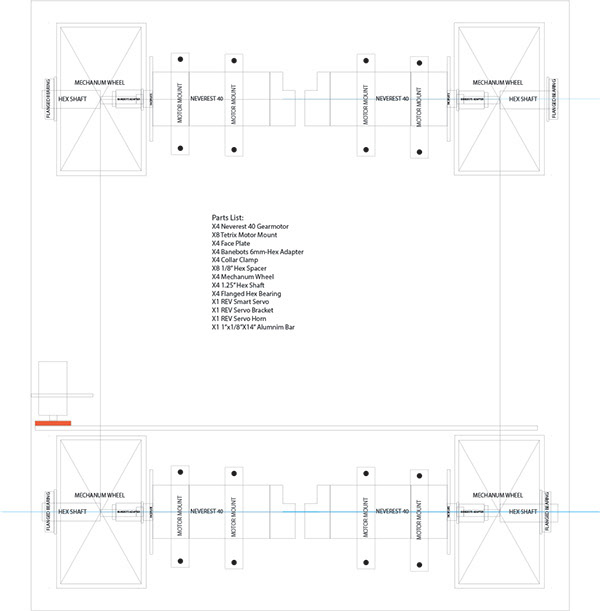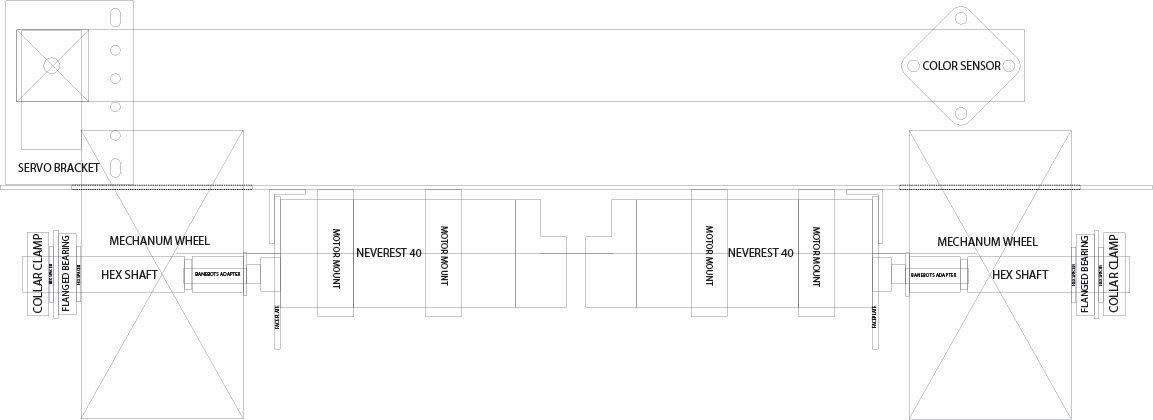
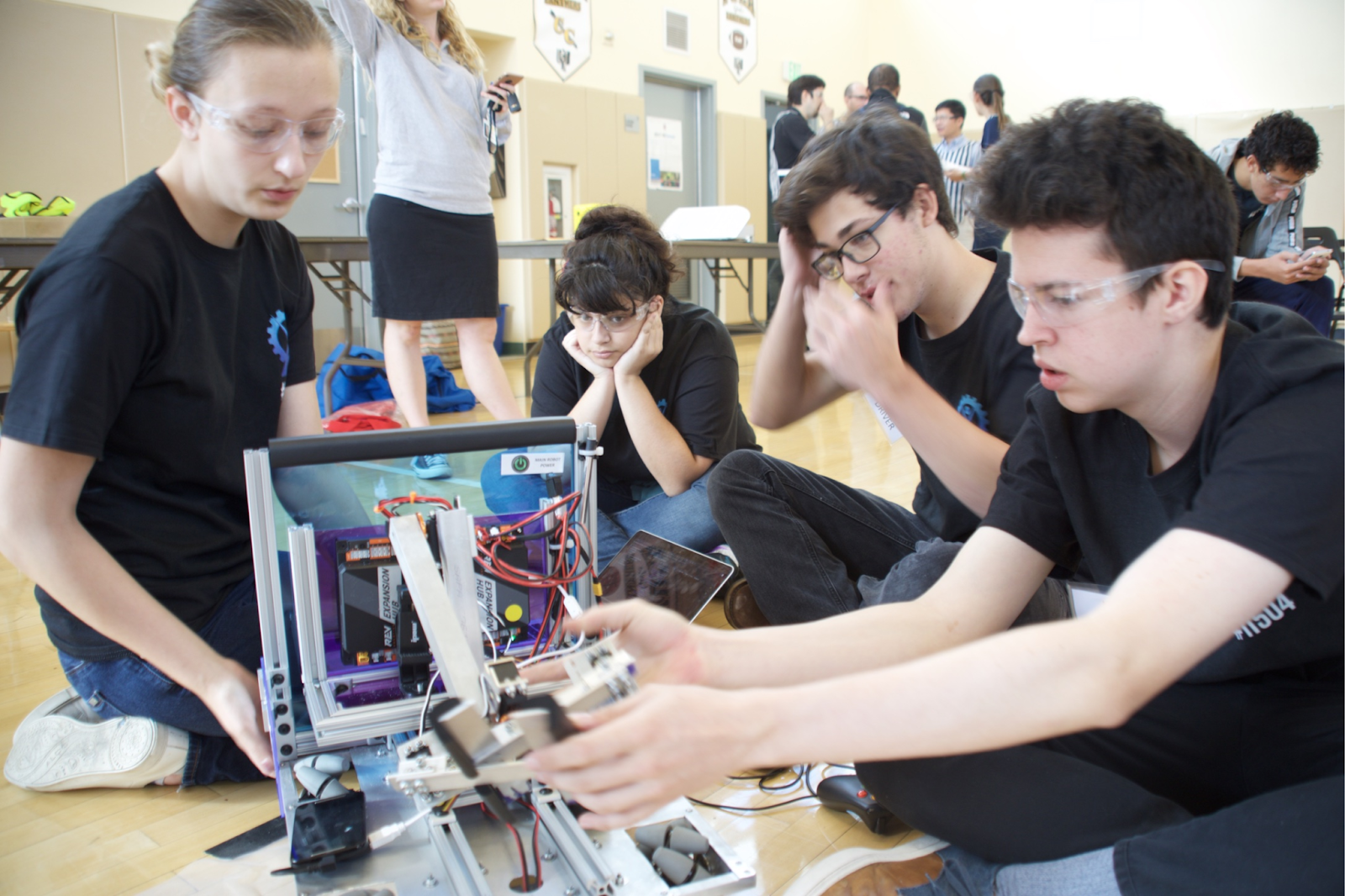
In the fall of 2017 through the spring of 2018, I led a twelve-person First Tech Challenge robotics team in the Relic Recovery competition. In addition to being team captain, I was responsible for the robot’s code, and a large percentage of the mechanical design, manufacturing, and assembly.
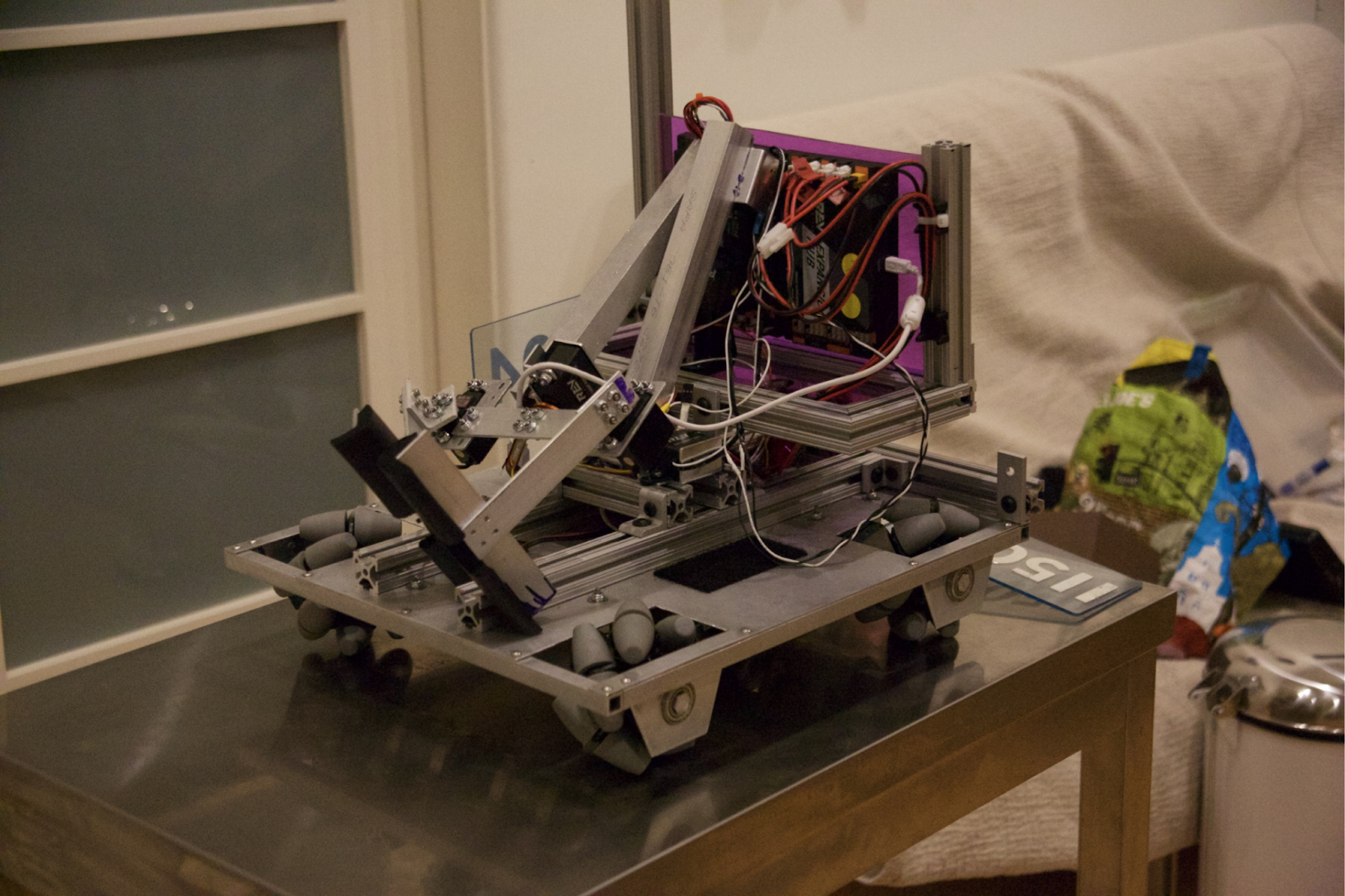
One feature of this design is the mecanum drive I programmed, which allows the robot to drive not only forwards, but also sideways and on a diagonal. The robot also had a grabber on an arm, controlled by servos, that enabled it to pick up and move blocks. The vertical design of the electronics board made it easy to access and modify components as needed.
https://github.com/FTCXenon/RelicRecoveryTestCode