This project was part of a class taken at RPI (Rensselaer Polytechnic Institute), called Introduction to Engineering Design. My particular group’s goal was to design a safe autonomous drone capable of seeding inaccessible areas, for reforestation efforts after wildfires. I, along with five other Engineering students, designed and built a prototype in nine weeks.
I was responsible for the code subsystem (Arduino), but also did the majority of the mechanical design for the project, in Fusion 360. I also did all the 3D printing for this project. All files were sliced in Ultimaker Cura and printed on a Prusa I3.
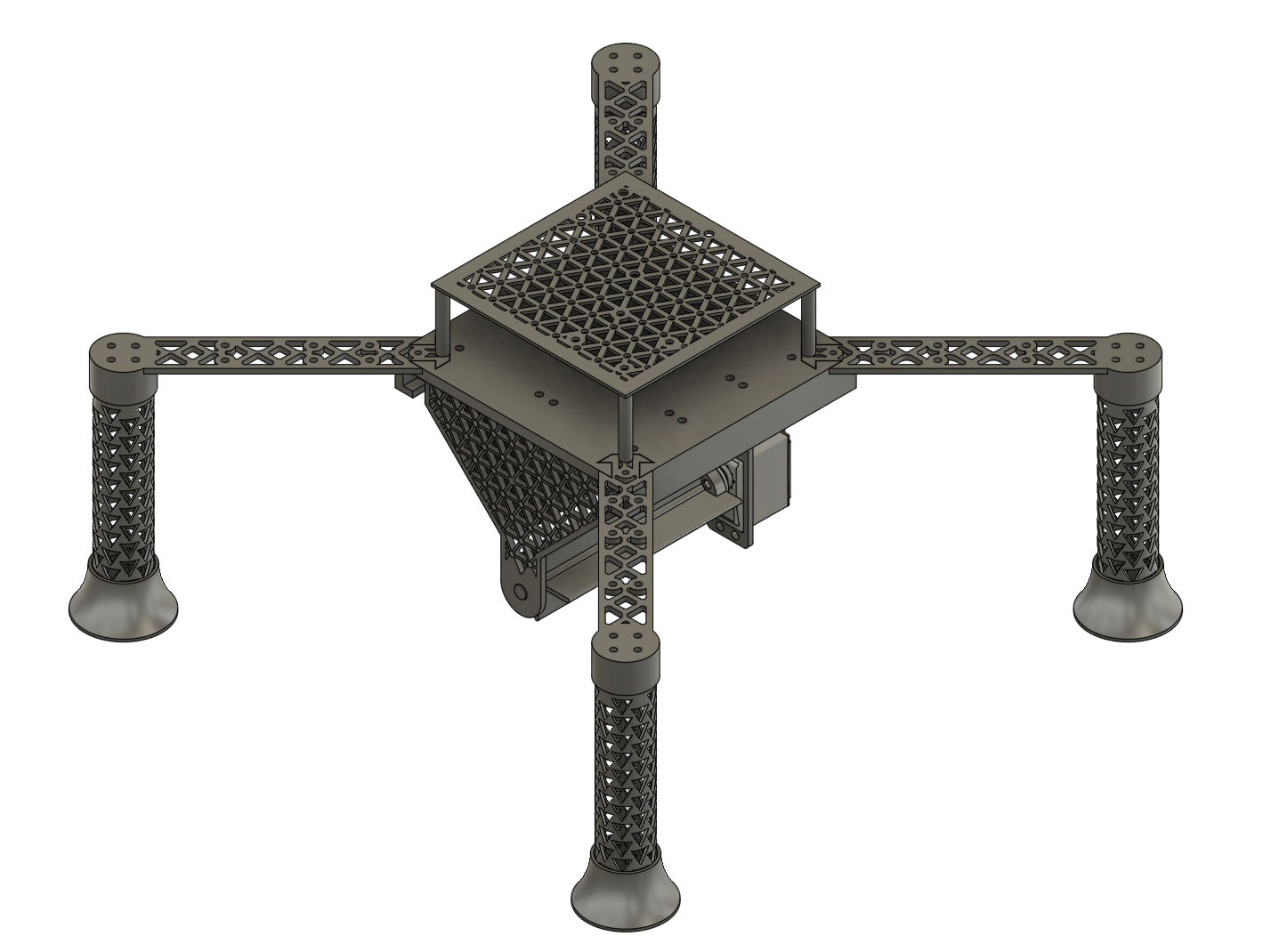
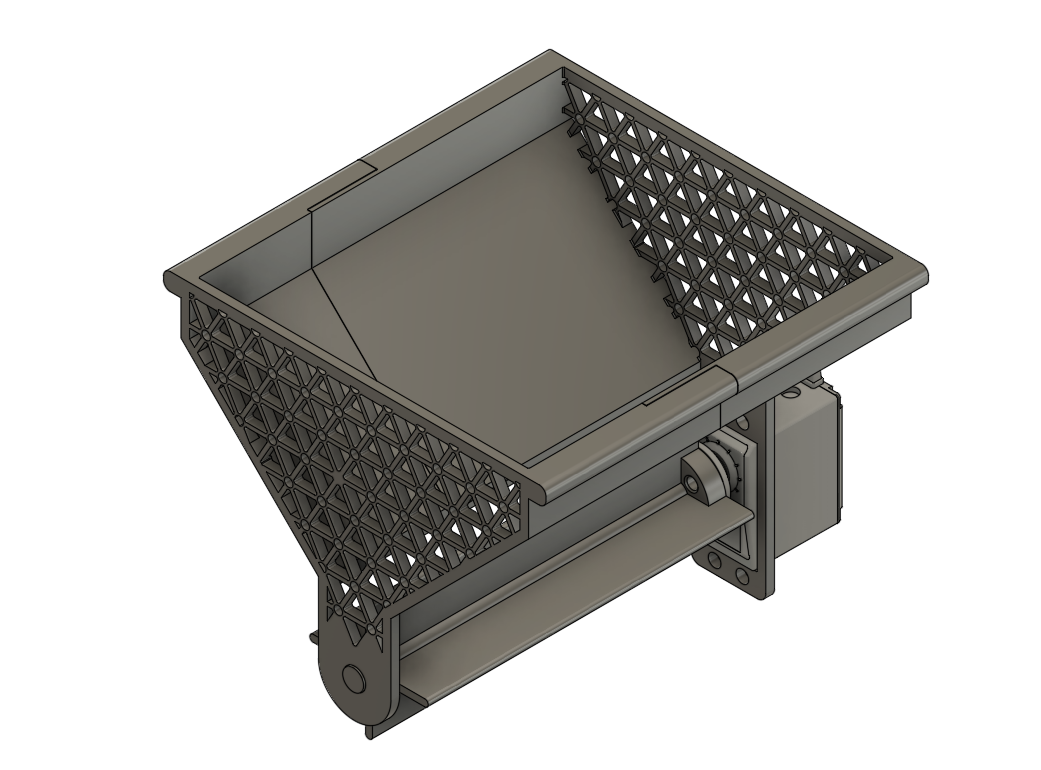
While there are many elements to this design, I thought I would limit commentary to a few of my favorites. I modeled the seed dispersal mechanism after a cereal dispenser, with a servo controlling a rotating paddle wheel. The dispenser sat on a lip under the electronics board, so it could slide out for easy removal and refilling. I designed the legs with printed threads, to screw into the bottom of the motor mounts. This along with the removable dispenser meant that the drone could be packed flat for ease of transportation. In addition, designing the landing legs this way helped me avoid any prints with overhangs & supports for the whole design. The legs, arms, and seed reservoir also featured an iso grid design for weight reduction, which was essential for ensuring the device could fly.

Below I have linked the final report, as well as the final presentation.