In the fall of 2018 through the spring of 2019, I led a twelve-person First Tech Challenge robotics team in the Rover Ruckus competition. In addition to being team captain, I was responsible for the robot’s code, and a large percentage of the mechanical design, manufacture, and assembly.
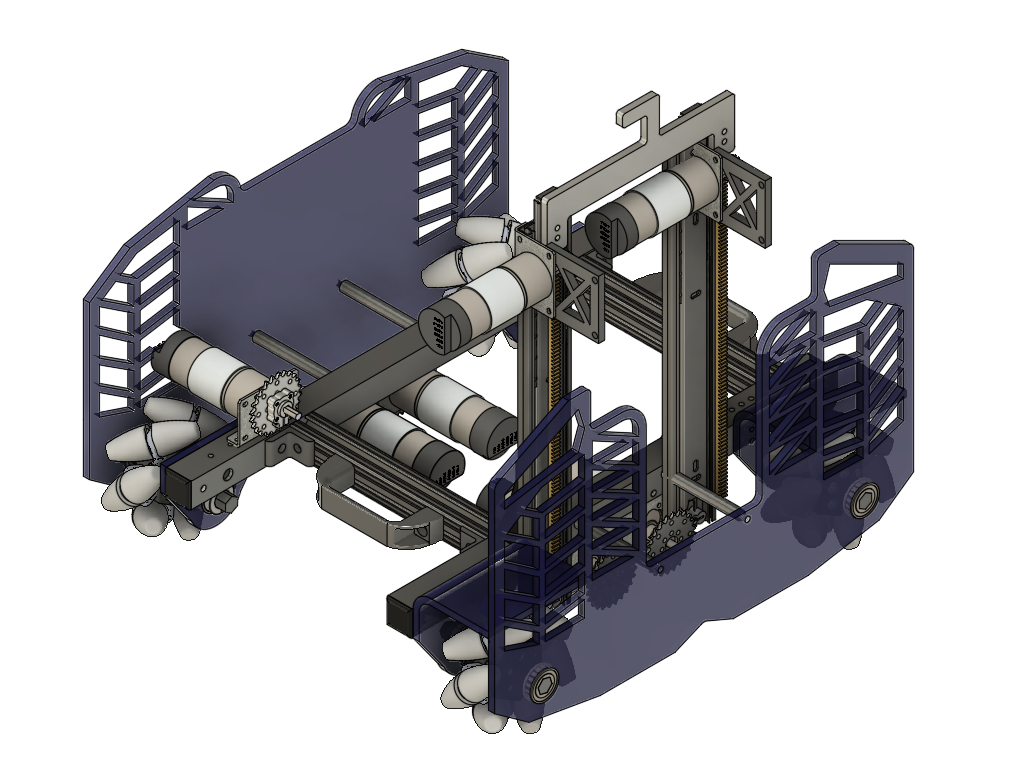
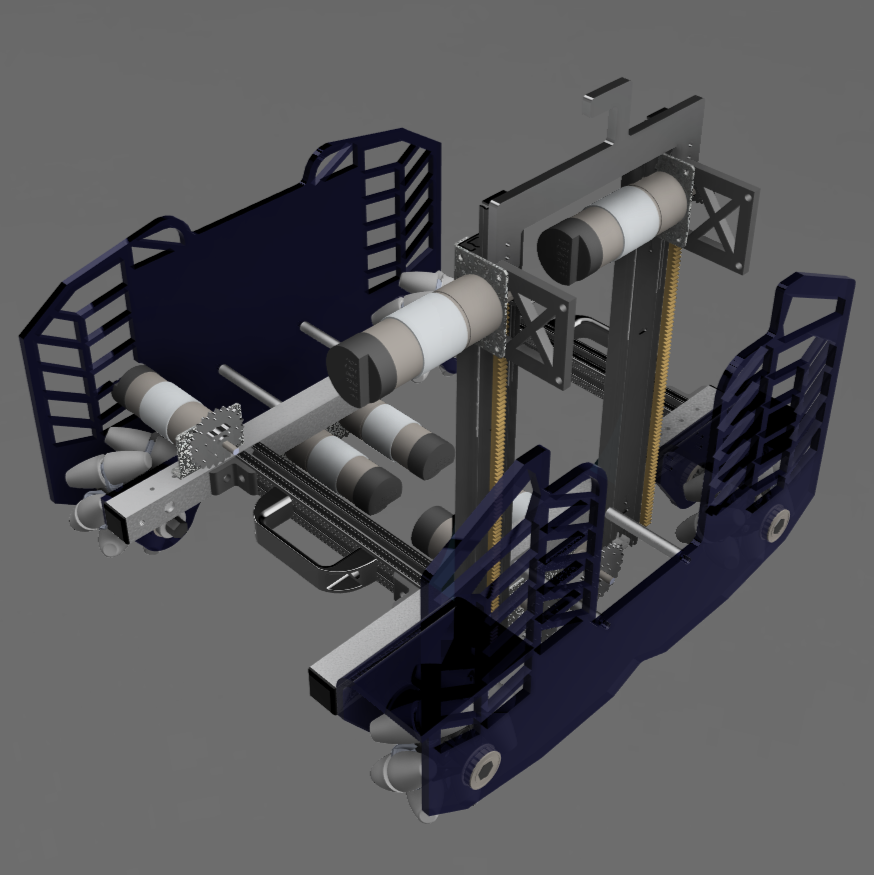
This robot was designed to perform several tasks, including pull itself off the ground via a hook, lower back to the ground, and dispense an object (team marker) into a designated spot on the field. Because it had to lift itself off the ground, weight reduction was very important. This is why the side plates were made of CNC-routered plexiglass. The main frame was made of aluminum extrusions, which allowed for the attachment of two handles which made transporting the robot much easier. It also allowed for the easy addition of the electronics board (not pictured below). The raising and lowering mechanism was operated by two high-torque motors, on a set of rack and pinions and drawer slides.
Above I have linked a short (17 second) clip of the autonomous program I wrote for this robot, where it lowers itself down from a hook, detaches itself, drives to a square on the floor, and deposits a team marker.